









Folgende Modelle befinden sich zur Zeit in meinem Hangar:
- Shark 304es (1:3,2; 5,60m) von Wildflug
- ASH 26 (1:3,5; 5m) von Tangent Modelltechnik
- ASH 26 V2 (1:3,5; 5m) von Tangent Modelltechnik
- GP Racer (4,20m) von Jiri Baudis (CZ)
- Pace VX 3.8 (m) von Daniel Lesky (AUT)
- Skywalker (3,80m) von Jiri Baudis (CZ)
- Orca 4eX (3,95m) von Aer-O-Tec
- Orca Pro (3,95m/3,64m) von Aer-O-Tec
Von großen Scalemodellen (OK - das ist heutzutage relativ, 1:3 ist für mich jedenfalls groß) bis hin zum Zweckmodell wird nahezu das komplette Spektum an Segelflugmodellen abgedeckt. Nurflügler und Verbrennermodelle sucht man aber vergebens, da mir Nurflügler nicht gefallen und ich keine stinkenden Verbrennermodelle in meiner Wohnung haben möchte.
Modelle, die nicht mehr in meinem Hangar weilen sind in der "Hall of Fame" zu finden.
Shark 304es
 Der Shark 304es ist der Ersatz für den leider viel zu früh dahingegangenen ersten Shark. Mit dem Maßstab 1:3,2 mit 5,60m Spannweite ist er eine Idee kleinerals sein Vorgänger. Wegen seines dünneren Profils ist er aber wesentlich dynamischer aufgestellt und auch mit verschiedenen Detaillösungen wie beispielsweise die Servoschächte in den Tragflächen ist er moderner als sein Vorgänger. Die Bauzeit des Shark war dennoch sehr lange, da zwischen Kauf und Erstflug fast ein Jahr vergangen ist. Dies lag einerseits an anderen Projekten, die es noch galt fertigzustellen wie auch vielen Detailproblemen, die einiges an Grübelei und Versuchen erforderte. Hier ist beispielsweise das werksseitig eingebaute Fahrwerk bzw. dessen Radbremse zu nennen.
Der Shark 304es ist der Ersatz für den leider viel zu früh dahingegangenen ersten Shark. Mit dem Maßstab 1:3,2 mit 5,60m Spannweite ist er eine Idee kleinerals sein Vorgänger. Wegen seines dünneren Profils ist er aber wesentlich dynamischer aufgestellt und auch mit verschiedenen Detaillösungen wie beispielsweise die Servoschächte in den Tragflächen ist er moderner als sein Vorgänger. Die Bauzeit des Shark war dennoch sehr lange, da zwischen Kauf und Erstflug fast ein Jahr vergangen ist. Dies lag einerseits an anderen Projekten, die es noch galt fertigzustellen wie auch vielen Detailproblemen, die einiges an Grübelei und Versuchen erforderte. Hier ist beispielsweise das werksseitig eingebaute Fahrwerk bzw. dessen Radbremse zu nennen.
Angetrieben wird der Shark über einen Nasenantrieb mit 40mm RFM-Spinner und einer 18x8,5 GM-Klapplatte, die ein Leopard 5065 mit 330KV antreibt. Die Leistung stellt ein 8s Akku (2x4s seriell) mit 4500mAh zur Verfügung, die über einen Hobbywing Skywalker V2 120A geregelt wird. Dieser stellt auch die 8V BEC-Spannung bereit, die das RC-System versorgen.
Das RC-System besteht aus deiner Centralbox 200 mit einem REX6A sowie einem REX3 als Satellitenempfänger wie auch einem RC-Switch für das bequeme Handling. Ein 2s2200 LiFePo Akku stellt die Standby- bzw. Backup-Versorgung des Systems dar.
Die Steuerbefehle werden an den Wölbklappen über KST X15 Servos, an den inneren Querrudern über KST X10 und an den äußeren Querrudern über KST X10 mini an die Ruder übertragen. An den Störklappen sind ebenfalls KST X10 mini am Werkeln.
Am Höhenruder arbeitet ein Hitec D954SW. Die restlichen Funktionen, also Schleppkupplung, Seitenruder, Einziehfahrwerk sowie Radbremse ist mit AGFRC B53 DHS Standardservos versehen. Alle KST-Servos sowie das Hitec-Höhenruderservo wurden im Rahmen einer Organspende aus dem verschiedenen Shark entnommen, wie auch das restliche RC-System. Nur der REX3 wurde neu beschafft, da mir ein RSat2 nicht mehr zeitgemäß erscheint. Auch das Vario mit GPS und Speedsensor, ein LinkVario Pro,wurde repariert aus dem Shark übernommen und mit Stromsensor, Drehzahlsensor sowie einem Motor-Temperatursensor versehen.
Um eine gute Sichtbarkeit zu gewährleisten sind unter den Flächen an den äußeren Servoschächten 12W Unilight ACL-Blitzer eingebaut. Zusätzlich blitzt ein weißes 24W LED-Beacon noch auf dem Runpfrücken knapp hinter der Kabinenhaube, um auch auf der Oberseite Sichtbarkeit zu haben. Die Blitzer werden über den Antriebsakku mittels Schaltregler, der nach dem Stromsensor positioniert ist, mit gut 12V betrieben.
Flugfertig bringt der Shark nicht ganz 12kg auf die Waage (12930g)
Der Erstflug des Shark 304es fand am 12. April 2025 im Rahmen des Saison-Opening statt.
ASH 26
 Die ASH 26 ist eine Art Backup zum Ventus. Es hat sich gezeigt, das ein Einsitzer im Maßstab 1:3,5 ein ziemlich praktisches und alltaugliches Modell ist. Daher habe ich mir die ASH 26 zugelegt weil sie einerseits robust gebaut ist und dennoch über genügend Leistungsreserven verfügt. Zudem ist sie preislich sehr interessant und auch kurzfristig lieferbar.
Die ASH 26 ist eine Art Backup zum Ventus. Es hat sich gezeigt, das ein Einsitzer im Maßstab 1:3,5 ein ziemlich praktisches und alltaugliches Modell ist. Daher habe ich mir die ASH 26 zugelegt weil sie einerseits robust gebaut ist und dennoch über genügend Leistungsreserven verfügt. Zudem ist sie preislich sehr interessant und auch kurzfristig lieferbar.
Sie war insofern ein Glücksgriff als dass sie mir die Zeit des sog. "Lockdowns" versüßte weil sie kurz vorher geliefert wurde und ich somit eine sinnvolle Beschäftigung hatte. Ziel war es zudem ein Modell mit Bodenstartfähigkeit zu bekommen ohne auf sensationell ineffiziente Klapp-Impeller zu setzen oder anfällige und teure Klapptriebwerke zu setzen. Daher bekam die ASH 26 ein FES spendiert.
Die Flächen sind 6-Klappenflächen (mit Ansteckflügeln) mit unten angeschlagenen Rudern ohne Störklappen. An der Wölbklappe arbeitet ein KST A15 1810, die Querruder werden von KST X10 betätigt. Alles jeweils in Servorahmen mit Gegenlagern von servorahmen.de.
Am Höhenruder in der Seitenflosse ist auch ein KST A15 1810 am Start, das Seitenruder wird von einem Hitec D-645 MH angesteuert.
Als Einziehfahrwerk kommt eine Hybridvariante von Dietmar Werner (Wemo) zum Einsatz. Dieses Fahrwerk bietet den Vorteil das Rad in eine Startstellung zu versetzen, um einerseits mehr wichtige Bodenfreiheit zu bekommen und andererseits ein abkippen nach vorne zu verhindern.
Das Fahrwerk wird von einem Chocofly HV 180/30 betätigt und verfügt über einen eingebauten Überlastschutz. Die Radbremse und auch die Schleppkupplung betätigt ein HK A15298B Servo.
Gesteuert wird all dies von einer Jeti CentralBox 200 an der ein RSat2 in der Seitenflosse als Sekundärempfänger und ein REX 6 Assist (mit Stabilisierung) als primärer Empfänger vorne agiert. Die Telemetriezentrale ist ein LinkVario Pro mit TEK-Düse, Differernzdrucksensor und Temperaturfühler sowie GPS.
Der Antrieb besteht aus einem Leopard LC5065 (520KV) mit Glider Adapter an einem geköpften 41mm (Reisenauer)-Mittelteil und 15x10" GM-Klappluftschraube sowie 44mm Scale-Spinnerkappe. Befeuert wird der Motor aus einem Hacker 6s 5000 LiPo (Eco-X). Die Drehzahlregelung erfolgt über einen Jeti Mezon 120 light, der auch die BEC-Versorgung für die RC-Elektronik übernimmt. Für den Fall der Fälle und zur Bereitstellung einer Standby-Stromquelle für den RC-Switch ist noch ein 2s 2500 A123 LiFePo im Modell vorhanden. Ein Eigenbau ACL findet auch noch Platz. Das Cockpit ist mit Ausnahme des Gurtzeug komplett selbst erstellt worden.
Der Erstflug der ASH 26 fand am 4. Juli 2020 statt.
ASH 26 V2
 Als Wiederholungstäter ist nun auch eine zweite ASH 26 in meinem Hangar. Sie wurde mit dem Ziel gebaut, ein alltagstaugliches Scalemodell zu bekommen, das mit einem effizienten, leisen Antrieb versehen ist und für den Flitschenstart geeignet ist. Der Antrieb besteht aus einem Getriebemotor Leopard LC 500 (1720KV) mit Superchief 6:1 Getriebe und 20x13 GM Propeller an einem 36mm Versatz-Mittelstück und 44mm Scale-Spinner. Als Regler fungiert ein Sword 100 der von einem 6s5000er Hacker Akku befeuert wird.
Als Wiederholungstäter ist nun auch eine zweite ASH 26 in meinem Hangar. Sie wurde mit dem Ziel gebaut, ein alltagstaugliches Scalemodell zu bekommen, das mit einem effizienten, leisen Antrieb versehen ist und für den Flitschenstart geeignet ist. Der Antrieb besteht aus einem Getriebemotor Leopard LC 500 (1720KV) mit Superchief 6:1 Getriebe und 20x13 GM Propeller an einem 36mm Versatz-Mittelstück und 44mm Scale-Spinner. Als Regler fungiert ein Sword 100 der von einem 6s5000er Hacker Akku befeuert wird.
Zudem ist die Ausstattung so gestaltet, das teilweise Komponenten aus älteren Modellen wiederverwendet wurden. So stammt beispielsweise das Einziehfahrwerk aus dem alten Krause-Discuis von Max, der Am Gaugen seinen letzten Flug hatte. Das Fahrwerk wurde mit Radbremse und Abdeckung gepimpt und versieht nun seinen Dienst in der ASH 26.
In den Tragflächen sind KST X10 Pro Servos an den äußeren Klappen eingebaut. Die inneren Klappen werden von KST A15 1810 bedient. Zur besseren Erkennung ist unter den Flächen jeweils ein tropfenförmiges Unilight ACL im Einsatz. Das wird durch ein Beacon am Rumpfrücken ergänzt.
Im Rumpf arbeitet ein KST A15 1810 am Höhenruder. Seitenruder, Einziehfahrwerk, Radbremse und Schleppkupplung werden von AGF-RC B53 DHS Standardservos betätigt.
Als Empfänger fungiert ein Jeti REX 12 Assist, der einen REX 3 als Backup verwendet. Die Stromversorgung erfolgt via Regler BEC über ein Voltario T70. Als Backup-Akku ist ein kleiner 2s Lifepo mit 800mAh vorhanden.
Die Telemetrieregie übernimmt ein LinkVario Pro mit TEK-Düse und Differenzdruckmessung für den Airspeed. Zusätzlich zur Variofunktion wird auch noch Motordrehzahl, Spannung und Stromaufnahme, Temperatur gemessen. Ein GPS-Sensor vervollständigt die Telemetriedaten.
Die ASH bringt 9950g Startmasse auf die Waage. Der Erstflug fand am 29. Juni 2024 statt.
GP Racer
 Der GP Racer schließt eine Lücke im Hangar zwischen Orca und Skywalker. Gewichtsmäßig liegt er mit einem Abfluggewicht von 4200g zwischen den beiden, von der Spannweite her gemessen ist er größer. Er stellt für mich eine zeitgemäße, moderne und elegante Version der Alpina dar und ist auch ein Allroundtalent. Sowohl im Bart beim Thermikkreisen wie auch beim Schnellflug ist der GP Racer in seinem Element. Das Modell ist als Standardversion gefertigt (160g CfK / 50g GfK). Was aber für alle Lebenslagen mehr als ausreicht.
Der GP Racer schließt eine Lücke im Hangar zwischen Orca und Skywalker. Gewichtsmäßig liegt er mit einem Abfluggewicht von 4200g zwischen den beiden, von der Spannweite her gemessen ist er größer. Er stellt für mich eine zeitgemäße, moderne und elegante Version der Alpina dar und ist auch ein Allroundtalent. Sowohl im Bart beim Thermikkreisen wie auch beim Schnellflug ist der GP Racer in seinem Element. Das Modell ist als Standardversion gefertigt (160g CfK / 50g GfK). Was aber für alle Lebenslagen mehr als ausreicht.
Die IDS-Anlenkungen sind auf höchstem Niveau und das stabilste, was ich bisher eingebaut habe. In den Flächen sind an Wölbklappe und Querruder KST X10 Servos am Start. Das Seitenruder wie auch das Höhenruder werden von KST X10 mini betätigt.
Der Antrieb besteht aus einem Leopard LC 500 (1450KV) an einem 5:1 Micro Edition Plus Getriebe von Andy Reisenauer. Die Kraft wird über ein 31mm Versatz-Mittelstück an GM 20x13 CfK-Klapplatten übertragen, verkleidet von einem 38mm Turbo-Spinner. Die Regelung übernimmt ein IBEX 115A BEC-Telemterie-Regler. Am Motor ist ein Temperatursensor auf den Windungen angebracht und über einen Hallsensor mit Positionsmagent wird auch der Propeller nach getaner Arbeit in eine horizontale Lage gebracht, um Schäden bei der Landung zu verhindern. Versorgt wird der Antrieb von einem Hacker eco 6s4000 LiPo Akku. Als Backup und zur Standby-Versorgung des Jeti RC-Switch dient ein Pichler 2s800 LiFePo-Akku. Dieser wird über eine Voltario T60 Akkuweiche angebunden, die auch die Telemetrie der RC-Versorgung übernimmt. Der Backup-Akku wird auch vom Voltario immer bei Bedarf geladen.
Den restlichen Teil der Telemetrie übernimmt ein GPS-Logger 3 von Stephan Merz, der über eine hinter der Fläche am Rumpfrücken montierte TEK-Düse die Variofunktion übernimmt.
Für den gutem Empfang ist ein Jeti REX10 Assist zuständig, der auch als Stabi agiert und alle Telemetriesensoren verbindet.
Um eine gute Sichtbarkeit auch in größeren Höhen zu gewährleisten, ist unter den Tragflächen jeweils ein tropfenförmiger ACL-Blitz von Unilight montiert. Die Steuerung übernimmt eine winzige Black.1 Steuerung. Die Versorgung erfolgt hierbei aus dem 8V BEC des IBEX Reglers.
Der Ersflug fand am 9. Juni 2023 auf dem Aichelberg statt.
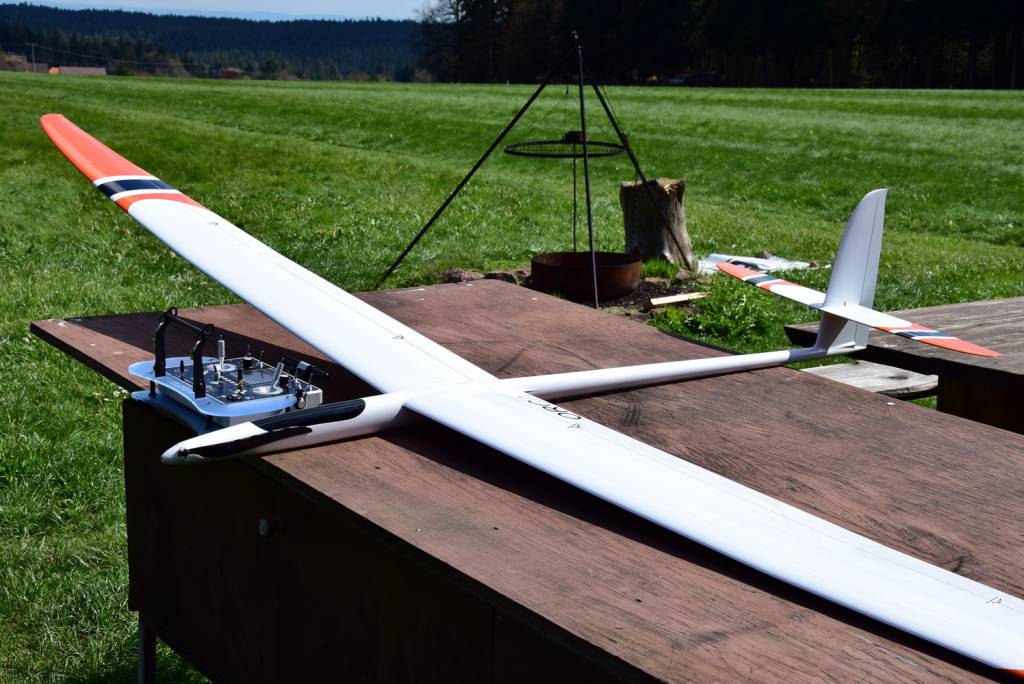
Pace VX 3.8
 Der Pace VX 3.8 ist mein schwerster Zweckflieger. Er bringt stramme 5.8kg unballastiert auf die Waage bei einer Spannweite von 3.8m.
Der Pace VX 3.8 ist mein schwerster Zweckflieger. Er bringt stramme 5.8kg unballastiert auf die Waage bei einer Spannweite von 3.8m.
Er ist mein Backup zum Skywalker als Zweckmodell für rauhe Bedingungen oder auch alpine Umgebung.
Bis man sich Pace-Besitzer nennen kann, bedarf es einiger Geduld, musste ich doch gut zweieinhalb Jahre auf das Modell warten. Aber die Wartezeit hat sich gelohnt. Der Pace kommt in einem schicken, gut sichtbaren Design daher und hat tolle Flugleistungen.
Angetrieben wird der Pace VX 3.8 von einer Peggy Pepper 3226 - 1600KV mit 6:1 Super Chief-Getriebe und Polygon-Welle (6/7mm). Das ganze bringt an einer GM 20x13 Klappluftschraube, 36mm gekröpftem Mittelteil und 40,5mm Turbospinner eine Eingangsleistung von rund 1,5kW. Befeuert wird der Antrieb von einem 6s 5000 Hacker eco LiPo Akku. Dieser versorgt über den Sword 80 V2 Regler auch das RC-System mit 8V BEC-Spannung.
 Um einen Plan B bei einem (sehr unwahrscheinlichen) Ausfall des BECs zu haben ist noch ein 2s600 LiFePo Akku mit im Modell untergebracht. Die Regie über beide Stromquellen incl. Einschaltung via RC-Switch und Telemetriefunktion) übernimmt der Voltario T60. Dieser lädt den LiFePo Backup-Akku auch im Betrieb, sodass ich hier nur sehr wenig nachzusehen brauche.
Um einen Plan B bei einem (sehr unwahrscheinlichen) Ausfall des BECs zu haben ist noch ein 2s600 LiFePo Akku mit im Modell untergebracht. Die Regie über beide Stromquellen incl. Einschaltung via RC-Switch und Telemetriefunktion) übernimmt der Voltario T60. Dieser lädt den LiFePo Backup-Akku auch im Betrieb, sodass ich hier nur sehr wenig nachzusehen brauche.
Als Telemetriezentrale zur Realiserung der Variofunktion, Antriebs-Strommessung, GPS sowie Temperaturmessung des Motors, dient ein LinkVario Duo von WSTech. Hier ist auch erstmals eine TEK-Düse im Einsatz, die etwas hinter der Tragfläche oben am Rumpfausleger entnehmbar montiert ist.
In der Tragfläche an den 6 Rudern sind ausschließlich KST X10 Servos mit Gegenlager im Einsatz. Auf QR sind IDS-Anlenkungen realisiert, bei den Wöllbklappen gehe ich auf Nummer Sicher und nutze die meiner Ansicht nach in der Praxis robustere Überkreuzanlenkung, da hier durchaus mal mit Bodenkontakt der Ruder zu rechnen ist.
Am Höhenruder ist ein KST BLS 915 im Einsatz, ein KST X15 908 versieht am Seitenruder seinen Dienst. Beide Ruder werden über Schubstangen angelenkt. All diese Servos werden von einem Jeti REX 10 Assist Empfänger befehligt.
Der Erstflug des Pace VX 3.8 fand am 14. August 2021 statt.
Skywalker
 Dies ist mein bisher schnellstes Modell. Der Skywalker ist zudem das erste Modell, das auf meine Bestellung hin gefertigt wurde und auch meinen Designvorschlag trägt. Es soll an das meiner Meinung nach tolle Design des Storm 3.0 erinnern.
Dies ist mein bisher schnellstes Modell. Der Skywalker ist zudem das erste Modell, das auf meine Bestellung hin gefertigt wurde und auch meinen Designvorschlag trägt. Es soll an das meiner Meinung nach tolle Design des Storm 3.0 erinnern.
Der Skywalker ist nach der Definition des Herstellers ein F3B Modell mit größerer Spannweite. Das kann ich so auch unterschreiben.
Er ist, mit Ausnahme des Rumpfbootes vorne, komplett aus extrem stabilen CFK gefertigt und von überragender Fertigungsqualität. Alle Ruder in den Flächen sowie das Seitenruder wurden anfangs mit RDS-Anlenkungen versehen. Nur das Pendel-Höhenruder ist klassisch angelenkt. Nach einigen Flügen stellte sich aber ein Ruderspiel an einigen Flächenklappen ein, weshalb die RDS-Anlenkungen in den Flächen komplett entfernt und gegen modifiztierte IDS-Anlenkungen ersetzt wurden (als echte Überkreuzanlenkung mit vernünftigen Hebelarmen). Seither gibt es, trotz schnellster Gangart keinerlei probleme mehr mit den Rudern. An allen 8 Rudern kommen KST DS225MG HV Servos zum Einsatz.
Als Antrieb wird ein Leopard Außenläufer mit Reisenauer 5:1 plus-Getriebe vom Typ LC 500 1450 KV verwendet zusammen mit einer GM 20x13 Klapplatte am gekröpften 36mm Mittelstück und 38mm Spinner. Zuvor war ein Hacker A40 10S V2 mit 6.7:1 Getriebe im Einsatz, was mir persönlich aber zu laut und klanglich sehr unangenehm war.
Dieser wird vom einem YEP90 Regler gesteuert, der auch die Betriebsspannung (BEC) zur Verfügung stellt. Zur Erfassung der Telemetriedaten des Antriebs für die RC-Anlage wird ein UniSens-E verwendet, der direkt mit dem Regler verlötet ist. Die nötige Energie wird von einem Hacker EcoX 6s3800 LiPo Akku bereitgestellt. Die RC-Anlage besteht aus einem Jeti REX 10Assist mit RSAT2. Das 8V BEC vom Regler wird über eine Voltario T60 Akkuweiche zugeleitet und der dort angeschlossene RC-Switch übernimmt die Ein-/ Ausschaltfunktion.Zusätzlich ist auch noch ein sog. "Backup-Akku" am Voltario angeschlossen, ein 2s LiFePo mit 1300mAh. Als Vario dient das im REX 10 eingebaute Vario. Die Sensorikwird über einen GPS-Logger3 realisiert, der zur Stromtelemetrie noch einen UniSens-E seriell verbunden hat. Eine TEK-Düse ist hinter dem Haubenausschnitt abnehmbar montiert.
Um die Sichtbarkeit zu verbessern ist noch ein Eigenbau ACL unter den Tragflächen auf den Servoschachtabdeckungen eingebaut. Gesteuert wird es über ein Unilight Black.1.
Flugfertig bringt der Skywalker 4920g auf die Waage. Der Raum im Skywalker ist bis auf das letzte ausgenutzt, sodass es Probleme gäbe, noch ein Stück Würfelzucker im Haubenbereich unter zu bringen.
Der Erstflug fand am 16. Mai 2015 statt.
Orca 4eX
 Der Orca 4eX ist mein Allrounder. Mit knapp 4m (3.95 Version) ist er ausreichend mit Spannweite gesegnet und durch die C160 Bauweise ist die Stabilität mehr als ausreichend. Das Design ist Standard und am Himmel sehr gut zu erkennen.
Der Orca 4eX ist mein Allrounder. Mit knapp 4m (3.95 Version) ist er ausreichend mit Spannweite gesegnet und durch die C160 Bauweise ist die Stabilität mehr als ausreichend. Das Design ist Standard und am Himmel sehr gut zu erkennen.
Mit knapp 3,3kg hat der Orca genügend Durchzug und kann bei windigen Bedingungen auch noch mit 6 Messingstäben um ca. 480g aufballastiert werden. In den Tragflächen sind 4 KST DS 225 MG Servos mit Überkreuzanlenkung (IDS-Modifikation) am Start. Am Höhen- und Seitenruder versieht ein KST MS-320 seinen Dienst.
 Die Motorisierung besteht aus einem Getriebemotor "PeggyPepper" 2425 mit 2410 k/V, einem 29mm Reisenauer Mittelstück mit 32mm Spinner (modifiziert) sowie 18x10 Klappluftschrauben von GM. Als Regler arbeitet ein Sunrise SWORD, der auch die 8V BEC Spannung zur Versorgung der Empfangsanlage und Servos zur Verfügung stellt. Der Antriebsakku ist ein Hacker Power X 4s 2400. Für die Steuerung ist ein Jeti REX10 Assist verantwortlich. Dieser bekommt seine Telemetriedaten von einem LinkVario mit 80A Stromsensor, GPS-Modul und Temperaturfühler im Motor zugespielt.
Die Motorisierung besteht aus einem Getriebemotor "PeggyPepper" 2425 mit 2410 k/V, einem 29mm Reisenauer Mittelstück mit 32mm Spinner (modifiziert) sowie 18x10 Klappluftschrauben von GM. Als Regler arbeitet ein Sunrise SWORD, der auch die 8V BEC Spannung zur Versorgung der Empfangsanlage und Servos zur Verfügung stellt. Der Antriebsakku ist ein Hacker Power X 4s 2400. Für die Steuerung ist ein Jeti REX10 Assist verantwortlich. Dieser bekommt seine Telemetriedaten von einem LinkVario mit 80A Stromsensor, GPS-Modul und Temperaturfühler im Motor zugespielt.
Der Erstflug des Orca fand am 29. April 2016 statt. Der bisher letzte am 24. September 2016 welcher mit einem furiosen 160km/h Einschlag in einen Baum endete, weil ich mal wieder die Distanz nicht richtig einschätzen konnte.
Seit Ende März 2017 ist der Orca, nach einer langwierigen Reparatur, wieder in der Luft und hat nichts von seiner Performance eingebüßt. Gefühlt ist er noch stabiler geworden. Lediglich die Optik ist nach der Beilackierung und dem misslungenen Polieren bzw. Schwabbeln nicht mehr ganz so toll.
Im Frühjahr 2022 bekam der Orca 4eX dann einen neuen Rumpf spendiert, mit einem praxistauglicheren Innenausbau, der nahezu identisch wie der des Schwestermodells (Orca Pro) ist.
Damit der Orca 4eX besser sichtbar ist am Himmel ist auch noch ein Eigenbau ACL (mit UniLight Abdeckungen) auf den Deckeln der Querruderanlenkung im Einsatz.
Orca Pro
 Der Orca Pro ist bereits der dritte Orca, den ich gebaut habe und ist das Ersatzmodell vom Ersatzmodell, das ich in der vergangenen Saison an einen hilfbedürftigen Piloten verkauft habe.
Der Orca Pro ist bereits der dritte Orca, den ich gebaut habe und ist das Ersatzmodell vom Ersatzmodell, das ich in der vergangenen Saison an einen hilfbedürftigen Piloten verkauft habe.
In der Pro-Version kommt der Orca mit einem etwas dickeren Hintern daher und hat ein anders Farben-Design. Die bedingt die Verwendung eines schwereren Antriebes als die Vorgänger in Form eines Getriebeantriebes mit Tenshock EDF 1540-9T mit 5:1 Micro Edition Getriebe, 29mm Mittelstück sowie 32mm Spinner und 18x10 GM-Klapplatten. Die Energie liefert der auch in den anderen Orcas verwendete Hacker 4s2400 PowerX Lipo. Als Regler kommt ein Sword 80 V2 zum Einsatz, dessen BEC die komplette RC-Stromversorgung übernimmt.
Ein zweites Paar Ansteckflächen erlaubt den Einsatz mit 3,64m Spannweite statt 3,95m mit den langen Ohren.
Am Höhenruder arbeitet ein KST A12-610, am Seitenruder ein X12-508. In den Tragflächen sind an Wölbklappen und Querruder KST X10 am Start.
Gesteuert wird der Orca Pro von einem Jeti REX 10 Assist-Empfänger. Die Telemetrie wird von einem LinkVarioPro ermittelt mit Stromsensor, GPS-Sensor und Temperaturmessung am Antrieb. Der Sword-Regler liefert noch ein Drehzahlsignal. Damit der Orca Pro besser sichtbar ist am Himmel ist auch noch ein Unilight ACL auf den Deckeln der Querruderanlenkung im Einsatz.
Flugfertig bringt der Orca Pro etwa 3.2kg Startmasse auf die Waage.
Der Erstflug fand am 19. März 2022 statt.