Der Einbau des Antriebes war schon eine Herausforderung. Das konnte duch die Planung der "Inneneinrichtung" aber noch getoppt werden.
Es hat lange gedauert, bis alle Komponenten vorne nun da sind, wo sie hin sollen und wo man gut an sie herankommt.
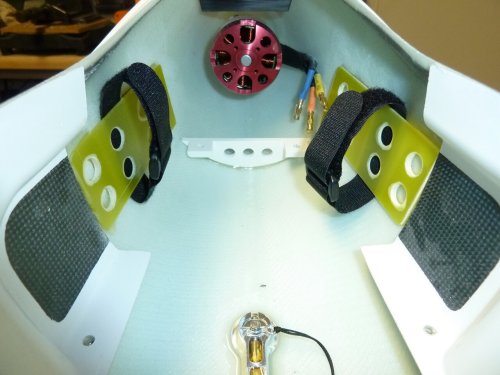
Einzig die Position der Antriebsakkus war von Anfang an gesetzt. Diese finden seitlich vorne neben dem Instrumentenpilz ihren Platz. Die dafür nötige Halterung mit Klettbandschlaufe war schnell erstellt. Dann gingen die Schwierigkeiten aber schon los.
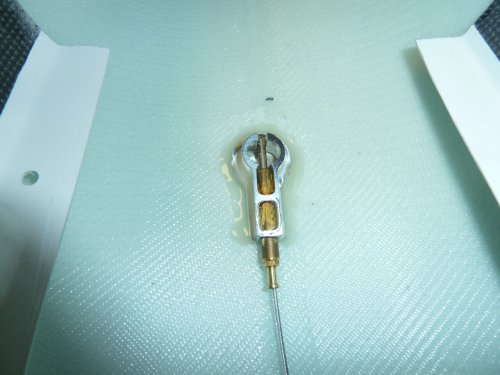
Als Schleppkupplung und Flitschenhaken wollte ich meine bewährte Spantenlkösung einsetzen und vom Ventus adaptieren. Hier zeigt sich aber der Unterschied zum 1:3 Shark. Bedingt durch den etwas kleineren Maßstab und den größeren Propeller war schlicht nicht genügend Platz vorhanden. Die angedachte Lösung konnte so also nicht realisiert werden. Wemo bieten eine sehr innovative Schgleppkupüplung an, die mit einem speziellen, verrriegelbaren Einsatz auch als Flitschenhaken dient.
Vorteil dieser Konstruktion ist die Anlenkung aus der Ferne mittels Bowdenzug. Somit kann das zuständige Servo weiter hinten an die Rumpf-Seitenwand angebracht werden.
Aber auch hier gab es anfangs Probleme. Das bereits eingebaute "Vagenknecht-Fahrwerk" nutze links und rechts aufggestellte und fest eingeharzte Seitenwände, die den Zugriff auf den Bereich neben dem Fahrwerk doch massiv einschränken. Erst nach leichten Editierarbeiten mit dem Dremel war genug Platz geschaffen, um die an die Seitenwand verklebten Servos im Servicefall (und den ziehe ich bei allen Komponenten immer mitz in Betracht) zu kommen und die Servos entnehmen zu können. Bei mir wird grundsätzlich nichts "verbaut" sonder so eingebaut, dass es einfach wieder entnehmbar bleibt.
Problem bei der Wemo-Schleppkupplung ist aber der Splint, der den Flitschenhaken sichert. Dieser verhindert, dass der Flitschenhaken im Flug versehentlich abgeworfen wird, wenn man die Schleppkupplung betätigt. Das war lenge Zeit das Ausschlusskriterium für diese Version. Nun konnte ich am CAD aber ein Akkubrett entwerfen, das vorne eine Aussparung mitbringt, um noch Zugriff von oben auf die Schleppkupplung zu bekommen. Das Akkubrett ist ansich kein solches sondern lediglich eine Halterung für die XT90-Stecker, an die die Akkus angeschlossen werden. Zudem trägt das Brett auch den Regler, der kopfüber mit den Kühlrippen nach unten zeigend im Modell liegt und mittels Kabelbinder am Brett fixiert wird. Erstmal ist das Teil (und der Haltespant vorne) als 3D-Druckteil ausgeführt, weil es keine nennenswerten Festigkeitseigenschaften benötigt. Ist ja nur zum Akku an- und abstecken.
Nächste Baustelle war dann der Haubenaufsteller, der wegen des geänderten Hauben-Klappmechanismus nicht wie im alten Shark realisiert werden konnte. Hier konnte nach viel Grübeln ein 3D-Druckteil gebaut werden, das Klappbar ist und ohne zu stören in der Ruheposition am Instrumentsnpilz anliegt.
Der Regler (Hobbywing Skywalker 120) zeigte sich bei der Inbetriebnahme nervig, da er endlos piepst, wenn kein Servosignal am Eingang anliegt.
Da ich bei größeren Modellen immer einen RC-Switch verwende, war dies Gepiepse im ausgeschalteten Zustand nicht hinnehmbar. Zudem steigt duch das Gepiepse die Standby-Stromaufnahme massiv an. Daher habe ich an den Microcontroller des Reglers eine Steuerleitung am Reset-Pin angelötet, die mit dem RC-Switch verbunden wird. So ist zudem sichergestellt, das der Regler niemals anlaufen kann (weil das ohne laufenden Prozessor nunmal nicht geht), solange der RC-Switch abgeschaltet ist. Wird das Kabel versehentlich abgezogen, ist der Regler immer aktiv. So ist das auch Kabelbruch-sicher.
Zudem empfand ich die Zuleitung als unpassend. Im Shark wird eine Centralbox 200 (vom alten Shark) verwendet. Diese hat als Spannungseingang MPX-Stecker. Daher hab ich das Zuleitungskabel direkt am Regler abgelötet und stattdessen Silikonkabel mit 0,75mm² Querschnitt direkt angelötet. Um das Akkubrett jederzeit entnehmbar zu machen, wurde eine Trennstelle mit XT30 Steckverbindung hergestellt. Hier kamen aber spezielle XT30 Stecker zum Einsatz, die auch noch einen kleinen Mittelkontakt haben, über den das Reglersignal geleitet wird.
Da ein leistungsfähiges ACL genutzt wird ist ein Regler mit BEC hier nicht sinnvoll, weiul nicht der ganze Strom vom Akku gemessen wird. Da als Vario das LinkVarioPro zum Einsatz kommt, wurde daher ein Unilog-Stromsensor (80A) zwischen Akku und Regler gelötet. Am Ausgang des Sensors geht zusätzlich auch eine Versorgungsleitung zur ACL-Steuerung weg.
Bleibt abschließend noch die Pilotenpuppe. Die 1:3 Puppe aus dem Shark ist doch recht üppig dimensioniert. Da komme ich an die Grenzen. Daher ist derzeit die 1:3,5 Puppe aus dem Ventus der Favorit.
Somit ist im vorderen Bereich nahezu alles fertig. Es muss noch ein Temperatursensor auf die Motorwicklung geklebt werden und das Kabel zur endgültigen Position des LinkvarioPro geführt werden.
Auch der Bowdenzug an der Schleppkupplung muss noch abgelängt und fixiert werden.
Danach geht es dann zur Radbremse, deren Servo auch an die seitliche Rumpfwand (rechts) kommt und via Bowdenzug angelenkt wird. Wenn das alles fertig ist, geht es nach hinten zu Seiten- und Höhenleitwerk. Ist auch das alles fertig kommen die Flächen an die Reihe. Hier warten auch schon wieder einige Probleme bei der Steckverbindung, weil die Wurzelrippe gebogen ist, was das festkleben der Steckergehäuse nicht unbedingt vereinfacht.