Pferde sollte man nicht von hinten aufzäumen, beim Pace VX 3.8 macht dies aber durchaus Sinn.
Weil unklar war, wie schwer der Pace hinten wird bzw. wie sich die Schwerpunktfindung gestaltet, hab ich erst einmal hinten die Anlenkungen fertiggestellt.
Damit wird dann klar, wieviel Gewichtt vorne vom Antrieb benötigt wird zur Erreichung des Schwerpunktes.
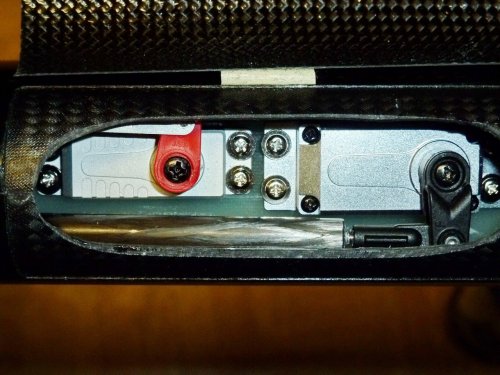
Gesagt getan. Die Servoausstattung ist mehr als üppig und für meinem Geschmack schon etwas über das Ziel hinausgeschossen. Aber egal, das KST X15 1810 für das Seitenruder sowie das BLS 915 aus der gleichen Servoschmiede für das Höhenruder wurden mittels des mitgelieferten Servobretts eingebaut. Zuvor wurde aber noch die Halterung für die gerade TEK-Düse eingehazt, die erstmals im Zweckmodell zum Einsatz kommt. Bisher hatte ich die gebogenen TEK-Düse immer an der Seitenflosse.
Die HR-Anlenkung ist recht unspektakulär. Die Schubstange ist ein 8mm CfK-Rohr in das beidseitig Gewindestangen eingeharzt wurden. Auf der Ruderseite wird darauf ein M3-Gabelkopf aufgeschraubt und in den Umlenkhebel eingeclipst. Servoseitig verbindet eine Kugelkopf-Anlenkung mit 14mm Servohebel von der Fa. Gabriel das Ganze mit dem Servo. Hier wurde die werksseitig vorhandene M2-Kugelkopfpfanne durch einen kompatiblen M3-Typen ersetzt.
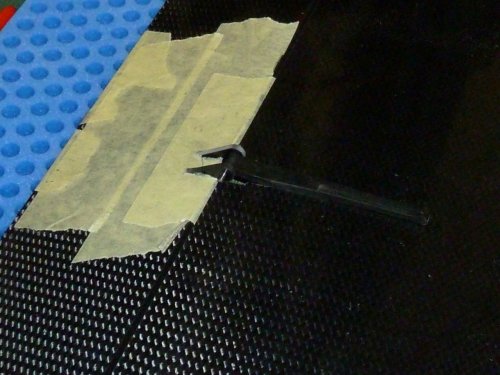
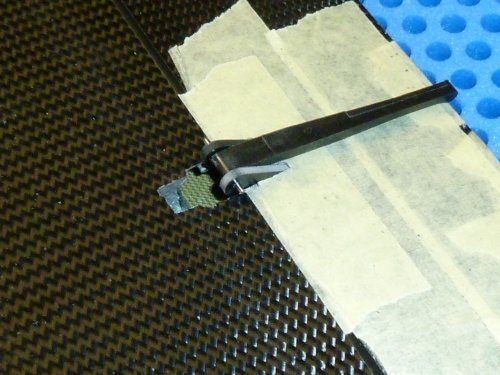
Die SR-Anlenkung war da schon um einiges kniffeliger. Zuerst musste Edelstahl-Gewindestange beschafft werden, da sich diese besser biegen lässt und danach auch stabiler ist als das Stahl-Pendant. Das Problem besteht darin die Gewindestange so zu biegen, dass sie an der gewünschten Stelle heraustritt in der korrekten Orientierung. Hier waren einige Versuche nötig und es ist auch nicht ganz unproblematisch, die gebogenen Stange wieder in den Rumpf einzufädeln.
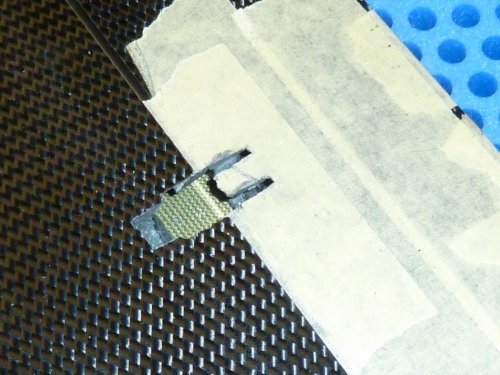
Die Verbindung zum Ruder übernimmt dann ein (für mich fast zu) massiver Alu-Gabelkopf mit verriegelbarem Querbolzen. Servoseitig wird ein M3 Gabelkopf verwendet.
Ich persönlich bevorzuge für diese Anlenkung Bowdenzüge und hätte mir bei der Bestellung eine Wahloption gewünscht. Beide Anlenkungen sind massiv, die SR-Anlenkung hat aber durch die Biegung (trotz umwicklung des gebogenen Drahtes mit getränkten CfK-Rovings) geringes Spiel in Ruhelage.
Somit waren die Anlenkungen fertig und der Pace somit auch "hintenrum", wenn man vom Ankleben der Abdeckungen einmal absieht. Somit kam der Pace auf die Schwerpunktwaage, um zu ermitteln, wieviel Gewicht vorne benötigt wird. Die Flächenservos spielen hierbei keine Rolle, weil sie im bzw. dicht am Schwerpunkt beheimatet sind und somit wenig signifikant für die Schwerpunktlage sind. Neben einem 6s5000er Akku (der dankenswerterweise doppelt im Bestand ist) kommt ein Getriebeantrieb "Peggy Pepper 3226 1600KV" mit Superchief 6:1 Getriebe als Vorgesetzten aus dem Hause Reisenauer zum Einsatz. Der Abtrieb erfolgt durch eine 6/7mm Polygonachse mit gekröpftem 36mm Mittelteil und 40mm Turbospinner. Damit müsste ich ohne Bleiballast den Schwerpunkt von empfohlenen 108mm erreichen.
Weiter geht es nun an den Flächen. Da die WK beim Butterfly theoretisch (und praktisch leider auch manchmal) den Boden berühren können, erschiem mir eine IDS-Anlenkung an diesem Ruder für eher weniger geeignet. Der IDS-Ruderhebel wirdkt wie eine Art Spaltkeil und kann Ober und Unterschalte des Ruders im Extremfall spalten (Leider schon beim Orca so erlebt).
Daher kommt hier eine doppelt ausgeführte Überkreuzanlenkung mit IDS-Teilen zum Einsatz. Hierzu hat mir Daniel Lesky freundlicherweise gefräste Ruderhebel beigelegt, die auch perfekt mit der IDS-Schubstange harmonieren. Die Erstellung der erforderlichen Ausschnitte war beim ersten Ruder etwas kniffelig, sollte beim zweiten aber wegen der vorhandenen Vorlage schneller und einfacher von der Hand gehen. Wenn man vorsichtig mit dem Dremel (mit flexwelle) und 2mm Fräser agiert ist das halb so schlimm. Als nächstes wird nun noch der Ausschnitt an der anderen Fläche erstellt, dann arbeitet ich mich Ruder für Ruder an der Fläche nach außen. Da hier (QR innen und außen) reine IDS-Anlenkungen zum Einsatz kommen, sollte das auch etwas einfacher zu bewerkstelligen sein.
Die Verkabelung wurde vorab schon erstellt und in die Fläche eingezogen. Steckerseitig habe ich MPX-Anschlussplatinen verwendet, da man die Kabel hier wesentlich entspannter und besser anlöten kann als direkt auf den Stecker. Servoseitig werden JR-Buchsengehäuse verwendet, damit ein ggf. nötiger Servowechsel ohne Lötarbeiten machbar ist. Hier sind die KST X10 Servos mit 5cm Anschlusskabel wirklich sehr nützlich. Die Verklebung der Servos und der Stecker in Rumpf und Fläche erfolgt dasnn zum Abschluss der Arbeiten an der Fläche. Danach widme ich mich dann den Einbau des Antriebes.